最初のプログラム
最初のプログラムを書く
それでは、最初のプログラムを書いてみましょう。
プログラムファイルの作成(Java)
まずは、Team Codeフォルダーに新しいJavaファイルを作成します。
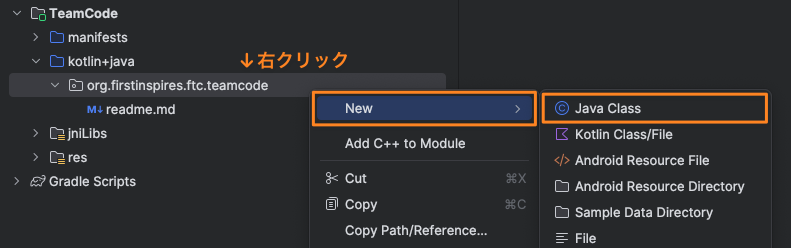
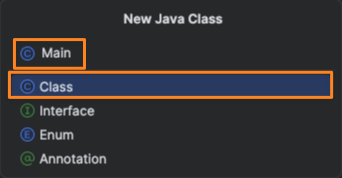
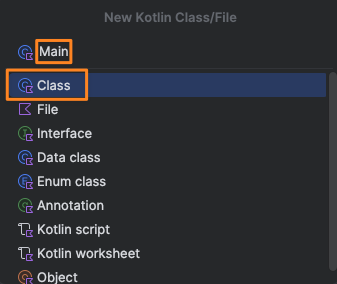
Classを選択し、「Main」という名前で作成します。
ファイルを作成すると、「Gitに追加しますか?」と出てくるので、「Add」を押します。

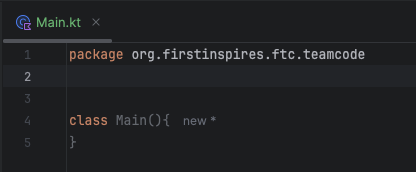
無事作成出来ると、以下の様なエディター画面が表示されます。
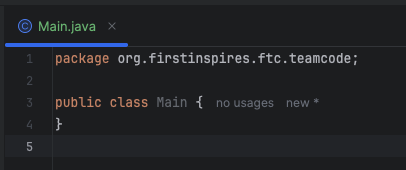
今回はサンプルのファイルを提供するので、以下のコードを貼り付けてください。
GitHub Gistで見るにはこちら
プログラムファイルの作成 (Kotlin)
まずは、Team Codeフォルダーに新しいKotlinファイルを作成します。
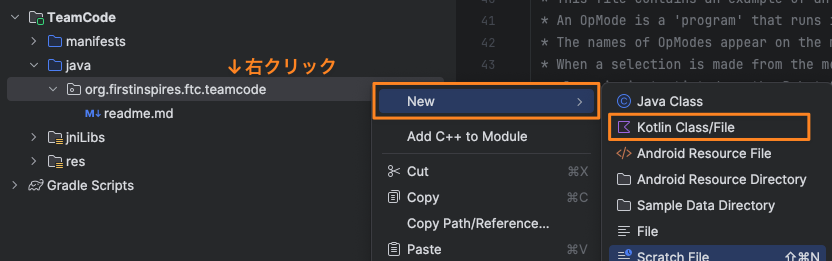
Classを選択し、「Main」という名前で作成します。
ファイルを作成すると、「Gitに追加しますか?」と出てくるので、「Add」を押します。

無事作成出来ると、以下の様なエディター画面が表示されます。
今回はサンプルのファイルを提供するので、以下のコードを貼り付けてください。
GitHub Gistで見るにはこちら
package org.firstinspires.ftc.teamcode
import com.qualcomm.robotcore.eventloop.opmode.OpMode
import com.qualcomm.robotcore.eventloop.opmode.TeleOp
@TeleOp(name = "Main OpMode", group = "Main")
class Main : OpMode() {
/*
* ドライバーがINITを押した際に、1度だけ実行されます。
*/
override fun init() {
}
/*
* ドライバーがINITを押した後、PLAYを押す前に繰り返し実行するコード
*/
override fun init_loop() {
}
/*
* プログラム開始時に一度だけ実行される
*/
override fun start() {
}
/*
* Enableの間ずっと実行される
* while (opModeIsActive()) と同じ
*/
override fun loop() {
}
/*
* コードが停止されるときに一度だけ実行される
*/
override fun stop() {
}
}