プログラムの種類- LinearOpModeとOpMode
FTCのJava(Kotlin)プログラムにおいては、2種類のプログラム構造が存在します。
FTC Japan Wikiでは、基本的にOpModeを使用して解説を行います。
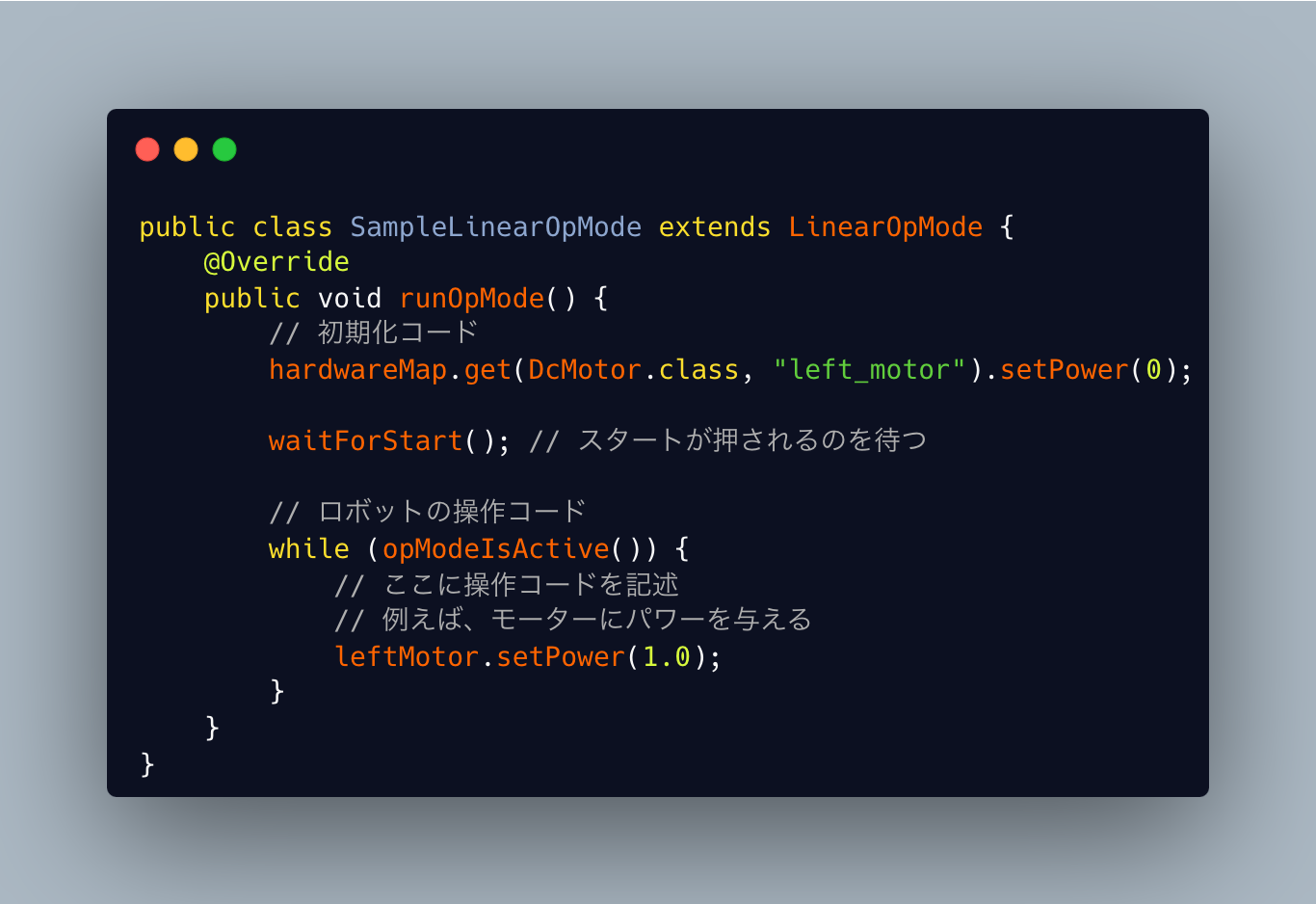
LinearOpMode
シーケンシャルな流れ: LinearOpMode は名前の通り、プログラムの流れが直線的(シーケンシャル)になります。コードは上から下へ順次実行され、ロボットの動作が順序立てて記述されます。
簡単に理解できる: ロボットの動作を順番に記述できるため、プログラムの動作を追いやすく、初学者やシンプルなロボット動作には適しています。
メソッド: runOpMode() メソッド内でロボットの初期化や操作が行われ、opModeIsActive() を使って動作が終了していないことを確認しながら動作を記述します。
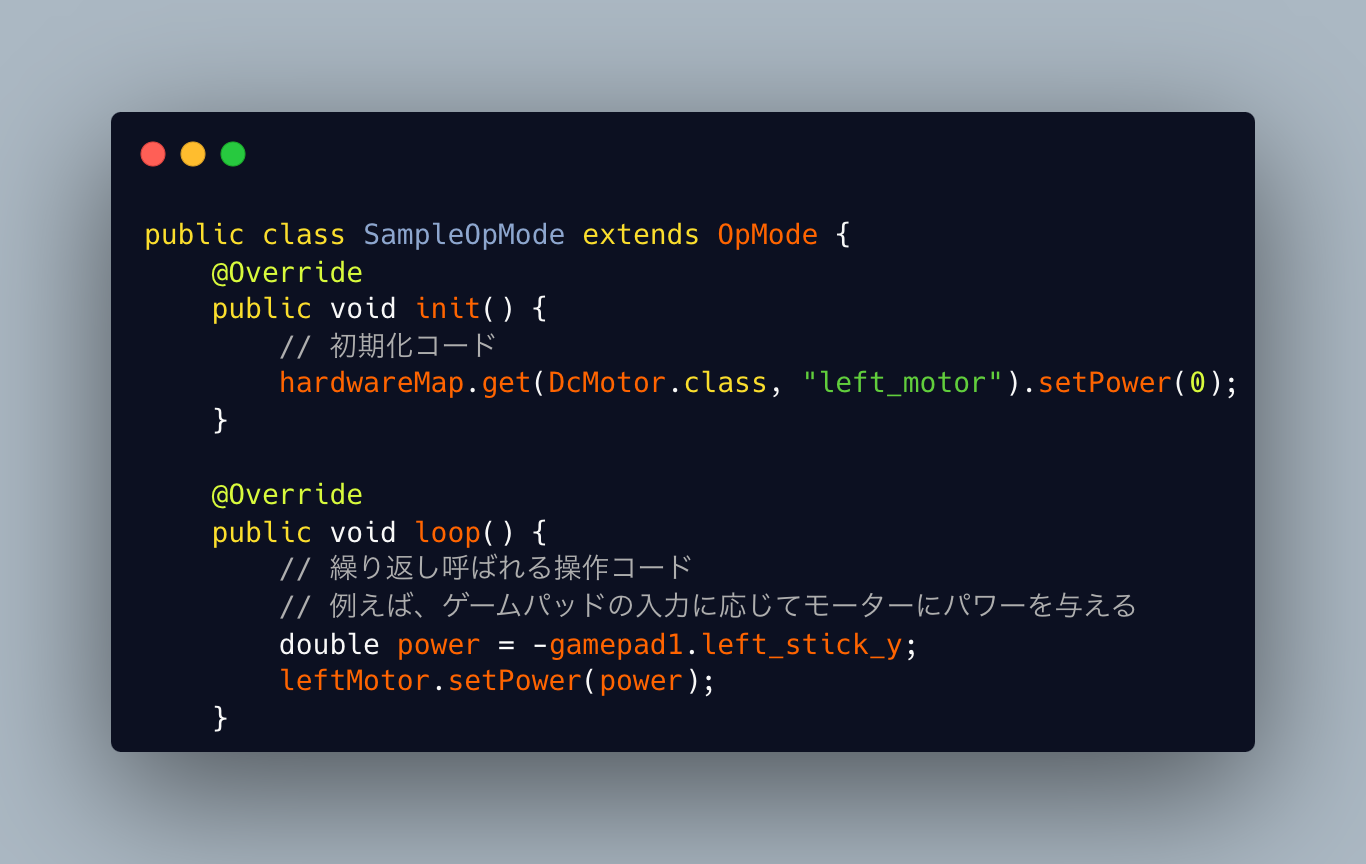
OpMode
ループベースの制御: OpMode はイベント駆動型で、繰り返し実行されるループの中でロボットの動作を制御します。FTCアプリによって、init() メソッドで初期化が行われ、その後 loop() メソッドが繰り返し呼び出されます。
柔軟性: ループが継続的に実行されるため、リアルタイムでセンサーの値をチェックしたり、反応する動作をプログラムしたりするのに適しています。
継続的な更新: 操作中にロボットの挙動を継続的に更新し続ける場合に便利です。ゲームパッドからの入力を継続的に監視するような場合に適しています。